#include <itkRigid3DTransform.h>
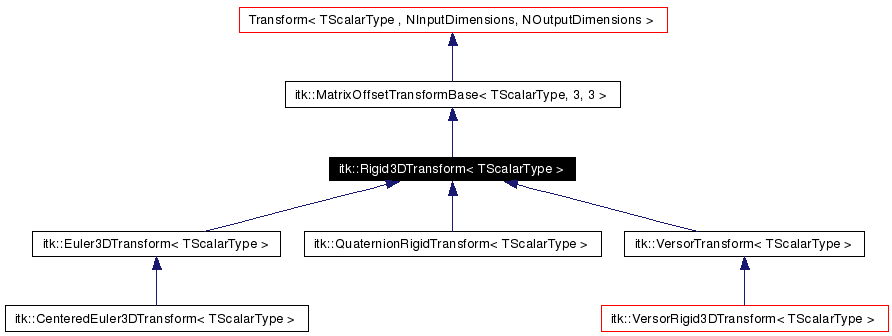
Inheritance diagram for itk::Rigid3DTransform< TScalarType >:
This transform applies a rotation and translation to the space
Definition at line 36 of file itkRigid3DTransform.h.
|
|||||
|
|||||
|
|||||
|
Standard covariant vector type for this class Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 65 of file itkRigid3DTransform.h. |
|
|||||
|
Standard coordinate point type for this class Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 70 of file itkRigid3DTransform.h. |
|
|||||
|
Standard vector type for this class Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 62 of file itkRigid3DTransform.h. |
|
|||||
|
Standard vnl_vector type for this class Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 68 of file itkRigid3DTransform.h. |
|
|||||
|
Standard inverse matrix type for this class Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 73 of file itkRigid3DTransform.h. |
|
|||||
|
Jacobian Type Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 60 of file itkRigid3DTransform.h. |
|
|||||
|
Standard matrix type for this class Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 72 of file itkRigid3DTransform.h. |
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
|||||
|
Parameters Type Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 59 of file itkRigid3DTransform.h. |
|
|||||
|
|||||
|
Standard scalar type for this class Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 61 of file itkRigid3DTransform.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 41 of file itkRigid3DTransform.h. |
|
|||||
|
|||||
|
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, and itk::VersorRigid3DTransform< TScalarType >. Definition at line 75 of file itkRigid3DTransform.h. |
|
||||||||||||||||
|
|
|
||||||||||||||||
|
|
|
|||||||||
|
|
|
|||||||||
|
|
|
||||||||||
|
Back transform by an affine transformation This method finds the point or vector that maps to a given point or vector under the affine transformation defined by self. If no such point exists, an exception is thrown.
|
|
||||||||||
|
Back transform by an affine transformation This method finds the point or vector that maps to a given point or vector under the affine transformation defined by self. If no such point exists, an exception is thrown.
|
|
||||||||||
|
Back transform by an affine transformation This method finds the point or vector that maps to a given point or vector under the affine transformation defined by self. If no such point exists, an exception is thrown.
|
|
||||||||||
|
Back transform by an affine transformation This method finds the point or vector that maps to a given point or vector under the affine transformation defined by self. If no such point exists, an exception is thrown.
|
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. |
|
|||||||||
|
Get rotation Matrix from an Rigid3DTransform This method returns the value of the rotation of the Rigid3DTransform.
Definition at line 86 of file itkRigid3DTransform.h. |
|
||||||||||||||||||||
|
Dimension of the space. |
|
||||||||||||||||||||
|
||||||||||||||||||||
|
||||||||||||||||||||
|
|||||||||
|
New macro for creation of through a Smart Pointer Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. Reimplemented in itk::CenteredEuler3DTransform< TScalarType >, itk::Euler3DTransform< TScalarType >, itk::QuaternionRigidTransform< TScalarType >, itk::ScaleSkewVersor3DTransform< TScalarType >, itk::Similarity3DTransform< TScalarType >, itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. |
|
||||||||||||||||
|
||||||||||
|
Set the rotation Matrix of a Rigid3D Transform This method sets the 3x3 matrix representing a rotation in the transform. The Matrix is expected to be orthogonal with a certain tolerance.
Reimplemented in itk::VersorRigid3DTransform< TScalarType >, and itk::VersorTransform< TScalarType >. Definition at line 99 of file itkRigid3DTransform.h. |
|
||||||||||
|
TransformCovariantVector can be simplified if the matrix is orthogonal as is the case for rigid transforms. This function call is specialization for rigid transforms. Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. |
|
||||||||||||||||
|
Compose the transformation with a translation This method modifies self to include a translation of the origin. The translation is precomposed with self if pre is true, and postcomposed otherwise. |
 1.3.5 written by Dimitri van Heesch,
© 1997-2000
1.3.5 written by Dimitri van Heesch,
© 1997-2000