#include <itkQuaternionRigidTransform.h>
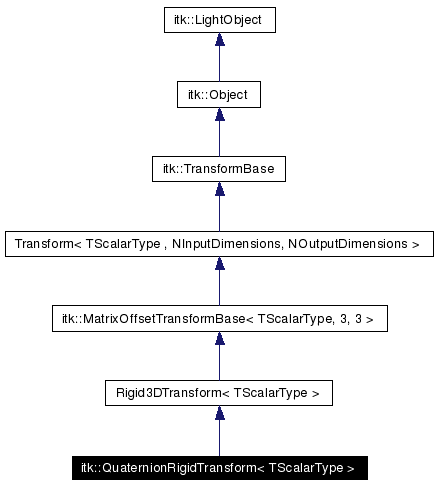
Inheritance diagram for itk::QuaternionRigidTransform< TScalarType >:
This transform applies a rotation and translation to the space
Definition at line 34 of file itkQuaternionRigidTransform.h.
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 73 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 42 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Standard covariant vector type for this class Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 68 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Standard coordinate point type for this class Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 61 of file itkQuaternionRigidTransform.h. Referenced by itk::QuaternionRigidTransform< TScalarType >::GetRotation(). |
|
|||||
|
Standard vector type for this class Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 63 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Standard vnl_vector type for this class Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 65 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Standard inverse matrix type for this class Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 72 of file itkQuaternionRigidTransform.h. Referenced by itk::QuaternionRigidTransform< TScalarType >::SetVarRotation(). |
|
|||||
|
Jacobian Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 59 of file itkQuaternionRigidTransform.h. Referenced by itk::QuaternionRigidTransform< TScalarType >::GetRotation(). |
|
|||||
|
Standard matrix type for this class Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 71 of file itkQuaternionRigidTransform.h. Referenced by itk::QuaternionRigidTransform< TScalarType >::GetRotation(). |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 74 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 70 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 62 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 64 of file itkQuaternionRigidTransform.h. Referenced by itk::QuaternionRigidTransform< TScalarType >::GetRotation(). |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 66 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Parameters Type Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 58 of file itkQuaternionRigidTransform.h. Referenced by itk::QuaternionRigidTransform< TScalarType >::GetRotation(). |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 41 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Standard scalar type for this class Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 60 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 39 of file itkQuaternionRigidTransform.h. Referenced by itk::QuaternionRigidTransform< TScalarType >::SetVarRotation(). |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 40 of file itkQuaternionRigidTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid3DTransform< TScalarType >. Definition at line 75 of file itkQuaternionRigidTransform.h. |
|
|||||
|
VnlQuaternion type. Definition at line 79 of file itkQuaternionRigidTransform.h. Referenced by itk::QuaternionRigidTransform< TScalarType >::SetVarRotation(), and itk::QuaternionRigidTransform< TScalarType >::~QuaternionRigidTransform(). |
|
||||||||||||||||
|
|
|
||||||||||||||||
|
|
|
|||||||||
|
|
|
|||||||||
|
Definition at line 119 of file itkQuaternionRigidTransform.h. References itk::QuaternionRigidTransform< TScalarType >::VnlQuaternionType. |
|
|||||||||
|
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. |
|
|||||||||
|
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. |
|
||||||||||
|
Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. |
|
||||||||||
|
Compute the Jacobian of the transformation. This method computes the Jacobian matrix of the transformation. given point or vector, returning the transformed point or vector. The rank of the Jacobian will also indicate if the transform is invertible at this point. Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::Rigid3DTransform< TScalarType >. |
|
|||||||||
|
Set the transformation from a container of parameters. This is typically used by optimizers. There are 7 parameters. The first four represents the quaternion and the last three represents the offset. Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. |
|
||||||||||
|
Get the rotation from an QuaternionRigidTransform. This method returns the value of the rotation of the QuaternionRigidTransform. * Definition at line 91 of file itkQuaternionRigidTransform.h. References itk::QuaternionRigidTransform< TScalarType >::InputPointType, itk::QuaternionRigidTransform< TScalarType >::JacobianType, itk::QuaternionRigidTransform< TScalarType >::MatrixType, itk::QuaternionRigidTransform< TScalarType >::OutputVectorType, and itk::QuaternionRigidTransform< TScalarType >::ParametersType. |
|
||||||||||||||||||||
|
Dimension of parameters |
|
||||||||||||||||||||
|
Dimension of parameters Reimplemented from itk::Rigid3DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of parameters Reimplemented from itk::Rigid3DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of parameters Reimplemented from itk::Rigid3DTransform< TScalarType >. |
|
|||||||||
|
New macro for creation of through a Smart Pointer Reimplemented from itk::Rigid3DTransform< TScalarType >. |
|
||||||||||||||||
|
Print contents of an Rigid3DTransform Reimplemented from itk::Rigid3DTransform< TScalarType >. |
|
||||||||||
|
Set the parameters to the IdentityTransform Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. |
|
||||||||||
|
Set the transformation from a container of parameters. This is typically used by optimizers. There are 7 parameters. The first four represents the quaternion and the last three represents the offset. Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 3, 3 >. |
|
||||||||||
|
Set the rotation of the rigid transform. This method sets the rotation of a QuaternionRigidTransform to a value specified by the user. |
|
||||||||||
 1.3.5 written by Dimitri van Heesch,
© 1997-2000
1.3.5 written by Dimitri van Heesch,
© 1997-2000