#include <itkCenteredSimilarity2DTransform.h>
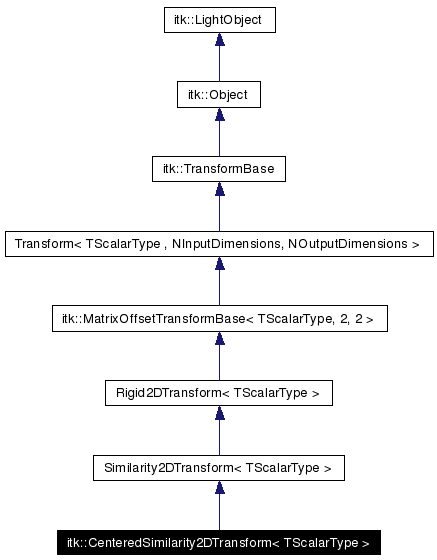
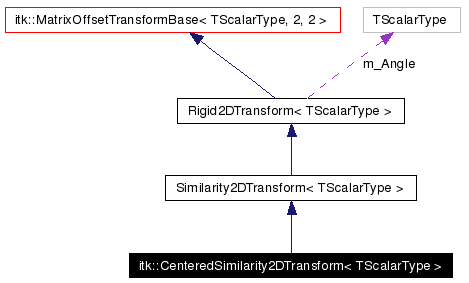
Inheritance diagram for itk::CenteredSimilarity2DTransform< TScalarType >:
This transform applies a homogenous scale and rigid transform in 2D space. The transform is specified as a scale and rotation around a arbitrary center and is followed by a translation. given one angle for rotation, a homogeneous scale and a 2D offset for translation.
The main difference between this class and its superclass Similarity2DTransform is that the center of transformation is exposed for optimization.
The serialization of the optimizable parameters is an array of 6 elements ordered as follows: p[0] = scale p[1] = angle p[2] = x coordinate of the center p[3] = y coordinate of the center p[4] = x component of the translation p[5] = y component of the translation
There are no fixed parameters.
Definition at line 54 of file itkCenteredSimilarity2DTransform.h.
|
|||||
|
Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 62 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
CovariantVector type. Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 98 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Point type. Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 90 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Vector type. Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 94 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
VnlVector type. Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 102 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Jacobian type. Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 84 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Offset type. Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 87 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 99 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 91 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 95 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 103 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Parameters type. Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 81 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 61 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Scalar type. Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 78 of file itkCenteredSimilarity2DTransform.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 59 of file itkCenteredSimilarity2DTransform.h. Referenced by itk::CenteredSimilarity2DTransform< TScalarType >::~CenteredSimilarity2DTransform(). |
|
|||||
|
Reimplemented from itk::Similarity2DTransform< TScalarType >. Definition at line 60 of file itkCenteredSimilarity2DTransform.h. |
|
|||||||||
|
|
|
||||||||||||||||
|
|
|
|||||||||
|
Definition at line 158 of file itkCenteredSimilarity2DTransform.h. References itk::CenteredSimilarity2DTransform< TScalarType >::Self. |
|
||||||||||
|
This method creates and returns a new Rigid2DTransform object which is the inverse of self. Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
||||||||||
|
This method creates and returns a new Rigid2DTransform object which has the same parameters. Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
||||||||||
|
Get the Fixed Parameters. An empty array is returned as there are no fixed parameters. Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 2, 2 >. |
|
||||||||||
|
This method computes the Jacobian matrix of the transformation at a given input point.
Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
||||||||||
|
Get the parameters that uniquely define the transform This is typically used by optimizers. There are 6 parameters. The first one represents the scale, the second represents the angle of rotation, the next two represent the center of the rotation and the last two represent the translation.
Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of parameters. |
|
||||||||||||||||||||
|
Dimension of parameters. Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of parameters. Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of parameters. Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
|||||||||
|
New macro for creation of through a Smart Pointer. Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
||||||||||||||||
|
Print contents of an Rigid2DTransform Reimplemented from itk::Similarity2DTransform< TScalarType >. |
|
||||||||||
|
Set the fixed parameters and update internal transformation. This is a null function as there are no fixed parameters. Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 2, 2 >. |
|
||||||||||
|
Set the transformation from a container of parameters This is typically used by optimizers. There are 6 parameters. The first one represents the scale, the second represents the angle of rotation, the next two represent the center of the rotation and the last two represent the translation.
Reimplemented from itk::Similarity2DTransform< TScalarType >. |
 1.3.5 written by Dimitri van Heesch,
© 1997-2000
1.3.5 written by Dimitri van Heesch,
© 1997-2000