#include <itkCenteredRigid2DTransform.h>
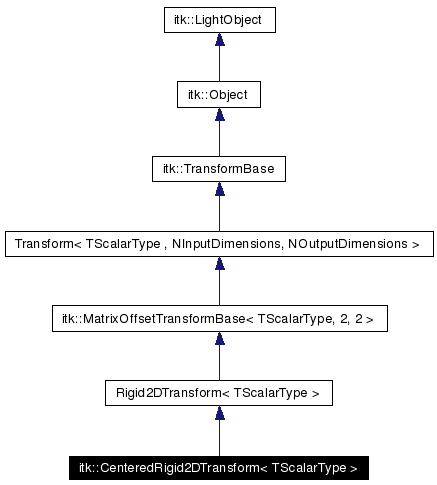
Inheritance diagram for itk::CenteredRigid2DTransform< TScalarType >:
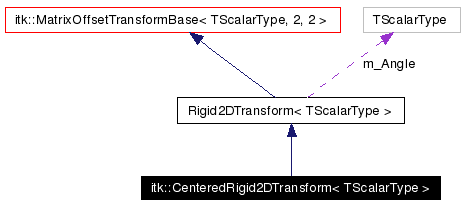
This transform applies a rigid transformation is 2D space. The transform is specified as a rotation around arbitrary center and is followed by a translation.
The main difference between this class and its superclass Rigid2DTransform is that the center of rotation is exposed for optimization.
The serialization of the optimizable parameters is an array of 5 elements ordered as follows: p[0] = angle p[1] = x coordinate of the center p[2] = y coordinate of the center p[3] = x component of the translation p[4] = y component of the translation
There are no fixed parameters.
Definition at line 52 of file itkCenteredRigid2DTransform.h.
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 60 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
CovariantVector type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 95 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Point type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 87 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Vector type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 91 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
VnlVector type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 99 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Jacobian type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 81 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Offset type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 84 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 96 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 88 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 92 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 100 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Parameters type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 78 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 59 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Scalar type. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 75 of file itkCenteredRigid2DTransform.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 57 of file itkCenteredRigid2DTransform.h. Referenced by itk::CenteredRigid2DTransform< TScalarType >::~CenteredRigid2DTransform(). |
|
|||||
|
Reimplemented from itk::Rigid2DTransform< TScalarType >. Definition at line 58 of file itkCenteredRigid2DTransform.h. |
|
|||||||||
|
|
|
|||||||||
|
Definition at line 150 of file itkCenteredRigid2DTransform.h. References itk::CenteredRigid2DTransform< TScalarType >::Self. |
|
||||||||||||||||
|
|
|
||||||||||
|
This method creates and returns a new CenteredRigid2DTransform object which is the inverse of self. Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||
|
This method creates and returns a new CenteredRigid2DTransform object which has the same parameters as self. Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||
|
Get the Fixed Parameters. An empty array is returned as there are no fixed parameters. Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 2, 2 >. |
|
||||||||||
|
This method computes the Jacobian matrix of the transformation at a given input point.
Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||
|
Get the parameters that uniquely define the transform This is typically used by optimizers. There are 3 parameters. The first one represents the rotation, the next two the center of rotation and the last two represents the offset.
Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of parameters. |
|
||||||||||||||||||||
|
Dimension of parameters. Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||||||||||||
|
Dimension of parameters. |
|
|||||||||
|
New macro for creation of through a Smart Pointer. Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||||||||
|
Print contents of an Rigid2DTransform Reimplemented from itk::Rigid2DTransform< TScalarType >. |
|
||||||||||
|
Set the fixed parameters and update internal transformation. This is a null function as there are no fixed parameters. Reimplemented from itk::MatrixOffsetTransformBase< TScalarType, 2, 2 >. |
|
||||||||||
|
Set the transformation from a container of parameters This is typically used by optimizers. There are 5 parameters. The first one represents the rotation, the next two the center of rotation and the last two represents the offset.
Reimplemented from itk::Rigid2DTransform< TScalarType >. |
 1.3.5 written by Dimitri van Heesch,
© 1997-2000
1.3.5 written by Dimitri van Heesch,
© 1997-2000