#include <itkNoiseImageFilter.h>
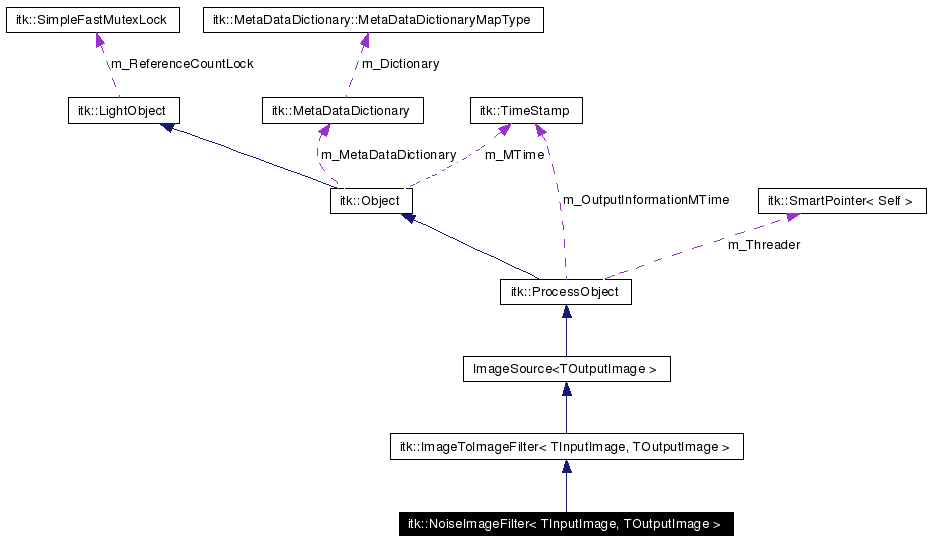
Inheritance diagram for itk::NoiseImageFilter< TInputImage, TOutputImage >:
Public Types | |
| typedef TInputImage | InputImageType |
| typedef TOutputImage | OutputImageType |
| typedef NoiseImageFilter | Self |
| typedef ImageToImageFilter< InputImageType, OutputImageType > | Superclass |
| typedef SmartPointer< Self > | Pointer |
| typedef SmartPointer< const Self > | ConstPointer |
| typedef InputImageType::PixelType | InputPixelType |
| typedef OutputImageType::PixelType | OutputPixelType |
| typedef NumericTraits< InputPixelType >::RealType | InputRealType |
| typedef InputImageType::RegionType | InputImageRegionType |
| typedef OutputImageType::RegionType | OutputImageRegionType |
| typedef InputImageType::SizeType | InputSizeType |
Public Member Functions | |
| virtual const char * | GetNameOfClass () const |
| virtual void | SetRadius (InputSizeType _arg) |
| virtual const InputSizeType & | GetRadius () |
| virtual void | GenerateInputRequestedRegion () throw (InvalidRequestedRegionError) |
| itkStaticConstMacro (InputImageDimension, unsigned int, TInputImage::ImageDimension) | |
| itkStaticConstMacro (OutputImageDimension, unsigned int, TOutputImage::ImageDimension) | |
Static Public Member Functions | |
| Pointer | New () |
Protected Member Functions | |
| NoiseImageFilter () | |
| virtual | ~NoiseImageFilter () |
| void | PrintSelf (std::ostream &os, Indent indent) const |
| void | ThreadedGenerateData (const OutputImageRegionType &outputRegionForThread, int threadId) |
Computes an image where a given pixel is the standard deviation of the pixels in a neighborhood about the corresponding input pixel. This serves as an estimate of the local noise (or texture) in an image. Currently, this noise estimate assume a piecewise constant image. This filter should be extended to fitting a (hyper) plane to the neighborhood and calculating the standard deviation of the residuals to this (hyper) plane.
Definition at line 45 of file itkNoiseImageFilter.h.
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 64 of file itkNoiseImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 77 of file itkNoiseImageFilter.h. |
|
|||||
|
Convenient typedefs for simplifying declarations. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 57 of file itkNoiseImageFilter.h. |
|
|||||
|
Image typedef support. Definition at line 73 of file itkNoiseImageFilter.h. |
|
|||||
|
Definition at line 75 of file itkNoiseImageFilter.h. |
|
|||||
|
Definition at line 80 of file itkNoiseImageFilter.h. Referenced by itk::NoiseImageFilter< TInputImage, TOutputImage >::~NoiseImageFilter(). |
|
|||||
|
Superclass typedefs. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 78 of file itkNoiseImageFilter.h. Referenced by itk::NoiseImageFilter< TInputImage, TOutputImage >::~NoiseImageFilter(). |
|
|||||
|
Some convenient typedefs. Reimplemented from itk::ImageSource< TOutputImage >. Definition at line 58 of file itkNoiseImageFilter.h. |
|
|||||
|
Definition at line 74 of file itkNoiseImageFilter.h. |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 63 of file itkNoiseImageFilter.h. |
|
|||||
|
Standard class typedefs. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 61 of file itkNoiseImageFilter.h. Referenced by itk::NoiseImageFilter< TInputImage, TOutputImage >::~NoiseImageFilter(). |
|
|||||
|
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. Definition at line 62 of file itkNoiseImageFilter.h. |
|
|||||||||
|
|
|
|||||||||
|
|||||||||
|
NoiseImageFilter needs a larger input requested region than the output requested region. As such, NoiseImageFilter needs to provide an implementation for GenerateInputRequestedRegion() in order to inform the pipeline execution model.
Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. |
|
|||||||||
|
Run-time type information (and related methods). Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. |
|
|||||||||
|
Get the radius of the neighborhood used to compute the noise |
|
||||||||||||||||||||
|
Extract dimension from input and output image. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. |
|
||||||||||||||||||||
|
Extract dimension from input and output image. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. |
|
|||||||||
|
Method for creation through the object factory. Reimplemented from itk::Object. |
|
||||||||||||||||
|
Methods invoked by Print() to print information about the object including superclasses. Typically not called by the user (use Print() instead) but used in the hierarchical print process to combine the output of several classes. Reimplemented from itk::ImageToImageFilter< TInputImage, TOutputImage >. |
|
||||||||||
|
Set the radius of the neighborhood used to compute the noise. In general, the radius should be small. But if set to one, the confidence in the estimates will be marginal. |
|
||||||||||||||||
|
NoiseImageFilter can be implemented as a multithreaded filter. Therefore, this implementation provides a ThreadedGenerateData() routine which is called for each processing thread. The output image data is allocated automatically by the superclass prior to calling ThreadedGenerateData(). ThreadedGenerateData can only write to the portion of the output image specified by the parameter "outputRegionForThread"
Reimplemented from itk::ImageSource< TOutputImage >. |
 1.3.5 written by Dimitri van Heesch,
© 1997-2000
1.3.5 written by Dimitri van Heesch,
© 1997-2000